
Trabajando en mi nuevo proyecto de robótica, me encontré con el problema mencionado en el título.
En todos lados encontré el famoso circuito del Puente H para invertir la polaridad en los bornes del motor y lograr el cambio de dirección de giro en un motor de CC.
Este puente se puede implementar de muchas maneras diferentes, puede ser con transistores o inclusive con integrados que traen ya la implementación de dos puentes inversores como el L293.
La otra posibilidad consiste en utilizar un relé doble inversor por cada rueda, usando 2 puertos de la placa de control por cada una.
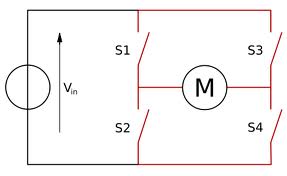
El esquema interno del relé doble inversor es algo así:
El relé tiene por defecto dos contactos cerrados y dos abiertos. Entonces, con un puerto de la placa de control manejamos la tensión del motor, enciendiendo o apagando.
Con el otro puerto manejamos el sentido de giro al energizar la bobina del relé.
Este es el esquema que armé para un relé doble inversor de 12v. en bobina:

y esta es la plaqueta universal armada con los dos relé doble inversor para el cambio de dirección de giro de dos ruedas del robot:

Gracias a la gente del proyecto ICARO por la ayuda !
